* Understanding Parameters
3 ros2 param get
To display the type and current value of a parameter, use the command:
ros2 param get
Let’s find out the current value of /turtlesim’s parameter background_g:
ros2 param get /turtlesim background_g
Which will return the value:
Integer value is: 864 ros2 param set
To change a parameter’s value at runtime, use the command:
ros2 param set
Let’s change /turtlesim’s background color:
ros2 param set /turtlesim background_r 150
Your terminal should return the message:
Set parameter successful5 ros2 param dump
You can view all of a node’s current parameter values by using the command:
ros2 param dump
The command prints to the standard output (stdout) by default but you can also redirect the parameter values into a file to save them for later. To save your current configuration of /turtlesim’s parameters into the file turtlesim.yaml, enter the command:
ros2 param dump /turtlesim > turtlesim.yaml
You will find a new file in the current working directory your shell is running in. If you open this file, you’ll see the following content:
/turtlesim:
ros__parameters:
background_b: 255
background_g: 86
background_r: 150
qos_overrides:
/parameter_events:
publisher:
depth: 1000
durability: volatile
history: keep_last
reliability: reliable
use_sim_time: false6 ros2 param load
You can load parameters from a file to a currently running node using the command:
ros2 param load
To load the turtlesim.yaml file generated with ros2 param dump into /turtlesim node’s parameters, enter the command:
ros2 param load /turtlesim turtlesim.yaml
Your terminal will return the message:
Set parameter background_b successful
Set parameter background_g successful
Set parameter background_r successful
Set parameter qos_overrides./parameter_events.publisher.depth failed: parameter 'qos_overrides./parameter_events.publisher.depth' cannot be set because it is read-only
Set parameter qos_overrides./parameter_events.publisher.durability failed: parameter 'qos_overrides./parameter_events.publisher.durability' cannot be set because it is read-only
Set parameter qos_overrides./parameter_events.publisher.history failed: parameter 'qos_overrides./parameter_events.publisher.history' cannot be set because it is read-only
Set parameter qos_overrides./parameter_events.publisher.reliability failed: parameter 'qos_overrides./parameter_events.publisher.reliability' cannot be set because it is read-only
Set parameter use_sim_time successful7 Load parameter file on node startup
To start the same node using your saved parameter values, use:
ros2 run <package_name> <executable_name> --ros-args --params-file <file_name>This is the same command you always use to start turtlesim, with the added flags --ros-args and --params-file, followed by the file you want to load.
Stop your running turtlesim node, and try reloading it with your saved parameters, using:
ros2 run turtlesim turtlesim_node --ros-args --params-file turtlesim.yaml
The turtlesim window should appear as usual, but with the purple background you set earlier.
1. 액션 (action)
액션(action)은 그림1의 `Node A - Node B`처럼 비동기식+동기식 양방향 메시지 송수신 방식으로 액션 목표 (goal)를 지정하는 Action Client과 액션 목표를 받아 특정 태스크를 수행하면서 중간 결괏값에 해당되는 액션 피드백(feedback)과 최종 결괏값에 해당되는 액션 결과(result)를 전송하는 Action Server 간의 통신이라고 볼 수 있다. 이는 ROS 1의 액션 컨셉과 동일하다.
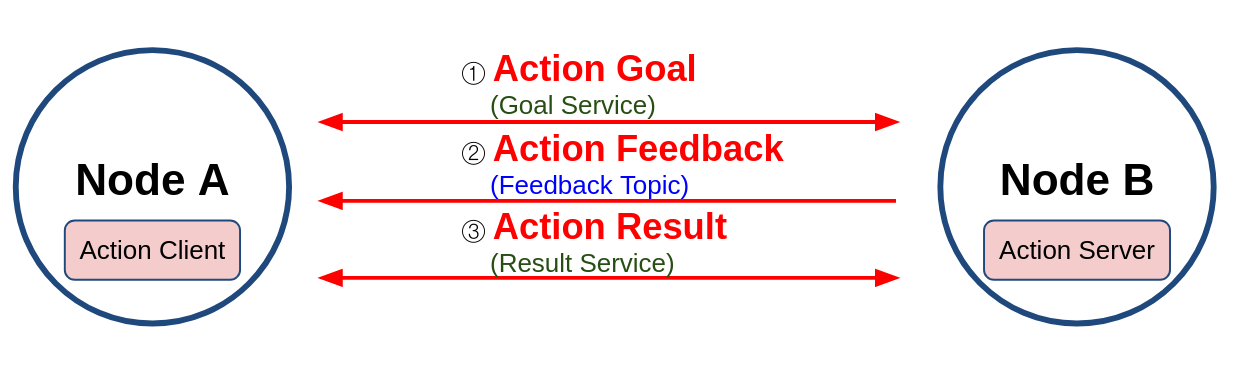
[그림 1: 액션 서버와 클라이언트]
추가로 액션의 구현 방식을 더 자세히 살펴보면 그림 2와 같이 토픽과 서비스의 혼합이라고 볼 수 있는데 ROS 1이 토픽만을 사용하였다면 ROS 2에서는 액션 목표, 액션 결과, 액션 피드백은 토픽과 서비스가 혼합되어 있다.
즉, 그림 2와 같이 Action Client는 Service Client 3개와 Topic Subscriber 2개로 구성되어있으며, Action Server는 Service Server 3개와 Topic Publisher 2개로 구성된다. 액션 목표/피드백/결과(goal/feedback/result) 데이터는 msg 및 srv 인터페이스[5]의 변형으로 action 인터페이스[5]라고 한다.

[그림 2: 액션 목표, 피드백, 결과]
ROS 1에서의 액션은 목표, 피드백, 결과 값을 토픽으로만 주고 받았는데 ROS 2에서는 토픽과 서비스 방식을 혼합하여 사용하였다. 그 이유로 토픽으로만 액션을 구성하였을 때 토픽의 특징인 비동기식 방식을 사용하게 되어 ROS 2 액션[10]에서 새롭게 선보이는 목표 전달(send_goal), 목표 취소 (cancel_goal), 결과 받기 (get_result)를 동기식인 서비스를 사용하기 위해서이다. 이런 비동기 방식을 이용하다보면 원하는 타이밍에 적절한 액션을 수행하기 어려운데 이를 원할히 구현하기 위하여 목표 상태(goal_state)라는 것이 ROS 2에서 새롭게 선보였다. 목표 상태는 목표 값을 전달 한 후의 상태 머신을 구동하여 액션의 프로스세를 쫒는 것이다. 여기서 말하는 상태머신은 Goal State Machine으로 그림 3과 같이 액션 목표 전달 이후의 액션의 상태 값을 액션 클라이언트에게 전달할 수 있어서 비동기, 동기 방식이 혼재된 액션의 처리를 원할하게 할 수 있게 되어 있다.
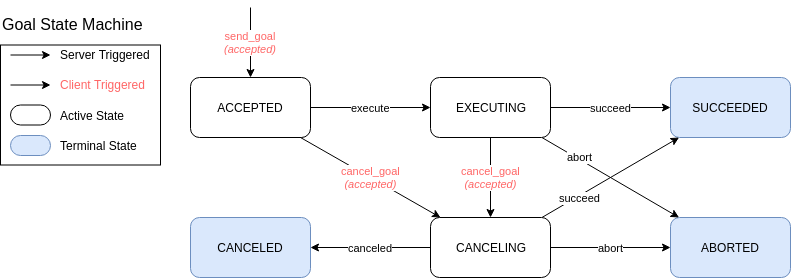
[그림 3: Goal State Machine]
2. 액션 서버 및 클라이언트
이번 ROS 2 액션 (action) 실습에도 지난 강좌 때와 마찬가지로 turtlesim 노드와 teleop_turtle 노드를 이용하여 테스트해보겠다. 아래와 같이 두개의 노드를 각각 실행하자.
1 Setup
Start up the two turtlesim nodes, /turtlesim and /teleop_turtle.
Open a new terminal and run:
ros2 run turtlesim turtlesim_node
Open another terminal and run:
ros2 run turtlesim turtle_teleop_key2 Use actions
When you launch the /teleop_turtle node, you will see the following message in your terminal:
Use arrow keys to move the turtle.
Use G|B|V|C|D|E|R|T keys to rotate to absolute orientations. 'F' to cancel a rotation.Try pressing the C key, and then pressing the F key before the turtle can complete its rotation. In the terminal where the /turtlesim node is running, you will see the message:
[INFO] [turtlesim]: Rotation goal canceled
Not only can the client-side (your input in the teleop) stop a goal, but the server-side (the /turtlesim node) can as well. When the server-side chooses to stop processing a goal, it is said to “abort” the goal.
Try hitting the D key, then the G key before the first rotation can complete. In the terminal where the /turtlesim node is running, you will see the message:
[WARN] [turtlesim]: Rotation goal received before a previous goal finished. Aborting previous goal
This action server chose to abort the first goal because it got a new one. It could have chosen something else, like reject the new goal or execute the second goal after the first one finished. Don’t assume every action server will choose to abort the current goal when it gets a new one.
3 ros2 node info
To see the list of actions a node provides, /turtlesim in this case, open a new terminal and run the command:
ros2 node info /turtlesim
Which will return a list of /turtlesim’s subscribers, publishers, services, action servers and action clients:
/turtlesim
Subscribers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
/turtle1/cmd_vel: geometry_msgs/msg/Twist
Publishers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
/rosout: rcl_interfaces/msg/Log
/turtle1/color_sensor: turtlesim/msg/Color
/turtle1/pose: turtlesim/msg/Pose
Service Servers:
/clear: std_srvs/srv/Empty
/kill: turtlesim/srv/Kill
/reset: std_srvs/srv/Empty
/spawn: turtlesim/srv/Spawn
/turtle1/set_pen: turtlesim/srv/SetPen
/turtle1/teleport_absolute: turtlesim/srv/TeleportAbsolute
/turtle1/teleport_relative: turtlesim/srv/TeleportRelative
/turtlesim/describe_parameters: rcl_interfaces/srv/DescribeParameters
/turtlesim/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
/turtlesim/get_parameters: rcl_interfaces/srv/GetParameters
/turtlesim/list_parameters: rcl_interfaces/srv/ListParameters
/turtlesim/set_parameters: rcl_interfaces/srv/SetParameters
/turtlesim/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
Service Clients:
Action Servers:
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
Action Clients:Notice that the /turtle1/rotate_absolute action for /turtlesim is under Action Servers. This means /turtlesim responds to and provides feedback for the /turtle1/rotate_absolute action.
The /teleop_turtle node has the name /turtle1/rotate_absolute under Action Clients meaning that it sends goals for that action name. To see that, run:
ros2 node info /teleop_turtle
Which will return:
/teleop_turtle
Subscribers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
Publishers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
/rosout: rcl_interfaces/msg/Log
/turtle1/cmd_vel: geometry_msgs/msg/Twist
Service Servers:
/teleop_turtle/describe_parameters: rcl_interfaces/srv/DescribeParameters
/teleop_turtle/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
/teleop_turtle/get_parameters: rcl_interfaces/srv/GetParameters
/teleop_turtle/list_parameters: rcl_interfaces/srv/ListParameters
/teleop_turtle/set_parameters: rcl_interfaces/srv/SetParameters
/teleop_turtle/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
Service Clients:
Action Servers:
Action Clients:
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute4 ros2 action list
To identify all the actions in the ROS graph, run the command:
ros2 action list
Which will return:
/turtle1/rotate_absolute
This is the only action in the ROS graph right now. It controls the turtle’s rotation, as you saw earlier. You also already know that there is one action client (part of /teleop_turtle) and one action server (part of /turtlesim) for this action from using the ros2 node info <node_name> command.
4.1 ros2 action list -t
Actions have types, similar to topics and services. To find /turtle1/rotate_absolute’s type, run the command:
ros2 action list -t
Which will return:
/turtle1/rotate_absolute [turtlesim/action/RotateAbsolute]
In brackets to the right of each action name (in this case only /turtle1/rotate_absolute) is the action type, turtlesim/action/RotateAbsolute. You will need this when you want to execute an action from the command line or from code.
5 ros2 action info
You can further introspect the /turtle1/rotate_absolute action with the command:
ros2 action info /turtle1/rotate_absolute
Which will return
Action: /turtle1/rotate_absolute
Action clients: 1
/teleop_turtle
Action servers: 1
/turtlesim
This tells us what we learned earlier from running ros2 node info on each node: The /teleop_turtle node has an action client and the /turtlesim node has an action server for the /turtle1/rotate_absolute action.
7 ros2 action send_goal
Now let’s send an action goal from the command line with the following syntax:
ros2 action send_goal
<values> need to be in YAML format.
Keep an eye on the turtlesim window, and enter the following command into your terminal:
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
You should see the turtle rotating, as well as the following message in your terminal:
Waiting for an action server to become available...
Sending goal:
theta: 1.57
Goal accepted with ID: f8db8f44410849eaa93d3feb747dd444
Result:
delta: -1.568000316619873
Goal finished with status: SUCCEEDED
All goals have a unique ID, shown in the return message. You can also see the result, a field with the name delta, which is the displacement to the starting position.
To see the feedback of this goal, add --feedback to the ros2 action send_goal command:
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: -1.57}" --feedback
Your terminal will return the message:
Sending goal:
theta: -1.57
Goal accepted with ID: e6092c831f994afda92f0086f220da27
Feedback:
remaining: -3.1268222332000732
Feedback:
remaining: -3.1108222007751465
…
Result:
delta: 3.1200008392333984
Goal finished with status: SUCCEEDED
You will continue to receive feedback, the remaining radians, until the goal is complete.
'자동제어 > ROS2' 카테고리의 다른 글
| ROS2 12장 서비스 (0) | 2023.04.13 |
|---|---|
| ROS2 11장 토픽 (0) | 2023.04.12 |
| 리눅스 민트 설정 (0) | 2023.04.11 |
| 001: ROS2 개발 환경 구축 (1) | 2023.04.10 |